





VRБҰ·ҙАЎКЦМЧDexmoҝӘ·ўЙМ»сКэЗ§НтФӘИЪЧК
ТӘ»сөГЧоХжКөЎўЧоіБҪюөДVRМеСй,ОеёРөД»№ФӯУИЖдЦШТӘ,УИЖдКЗҙҘҫхЎЈХэИзЎ¶Н·әЕНжјТЎ·ЦРөДҙҘёРКЦМЧәНX1МЧЧ°Т»Сщ,НкИ«»№ФӯРйДвКАҪзЦРөДҙҘёРЎЈДҝЗ°Аҙҝҙ,ТӘҙпөҪөзУ°ЦРөДј¶ұр»№УРР©ТЈФ¶,ө«КРіЎЙПөДТ»Р©ДЬ№»ҙшАҙБҰ·ҙАЎөДНвЙиЧ°ЦГТСҫӯДЬ»№ФӯІҝ·ЦМеСйЎЈDexta Robotics№«ЛҫөДDexmo VRКэҫЭКЦМЧҫНКЗИзҙЛЎЈ
ХвҝоКэҫЭКЦМЧНвРОҝҙЖрАҙҫНПсҝбмЕөД»ъРөКЦ,ҝЙТФМṩЎ°instant force feedbackЎұ (јҙКұБҰ·ҙАЎ),ёщҫЭРйДвОпЖ·өДРОЧҙТФј°ИнУІІ»Н¬,К№өГГҝёцКЦЦё¶јДЬёРөҪІ»Н¬іМ¶ИөДҙҘ·ўБҰЎЈ
ҪсИХ,СР·ўБЛХвҝоКЦМЧөДDexta RoboticsРыІј»сөГУЙЕН№ИҙҙН¶БмН·,РАНъҙпёъН¶өИКэЗ§НтФӘМмК№ВЦИЪЧК,ҪиҙЛ»ъ»б,VRНУВЭТІІЙ·ГөҪЖдCEO№ИеРіЫ,ҪйЙЬБЛХвҝоКЦМЧөДУҰУГіЎҫ°ЎЈ

ЛщОҪөДБҰ·ҙАЎКЦМЧDexmo VRКЗ?
Dexta RoboticsіЙБўУЪ2014Дк,ЦчТӘіЙФұАҙЧФУў№ъҪЈЗЕҙуС§ЎўГА№ъјУЦЭҙуС§ЎўUIUCЎўRHITЎўЦР№ъЗе»ӘҙуС§өИёЯөИС§ё®,ЖдЦР»№УРТ»ГыАҙЧФҪЈЗЕҙуС§өДИЛ»ъҪ»»ҘКөСйКТөДҪМКЪЎЈ
ЖдКөФзФЪИҘДкөДТ»ҙОРРТө»о¶ҜЙП,НУВЭҫэҫНФшҫӯМеСйөҪХвҝоDexmoКЦМЧ,ЖдҝбмЕөДНвРОТІИГ¶аИЛЧӨЧг,ХщПаЕЕ¶УМеСйЎЈ

УИјЗөГөұКұМеСйБЛјёёцDemo,ЧҘ·ҪҝйЎўЗтМеәНРЎ»ЖСјЎЈФЪҙ©ҙчЙПКЦМЧәу,ұШРлПИҪшРРРЈЧј,Ҫ«ёцИЛКЦІҝөДРЕПўВјИлөҪPCЦР,И»әуPCЦР»бЙъіЙПаУҰөДКЦІҝДЈРНЎЈ
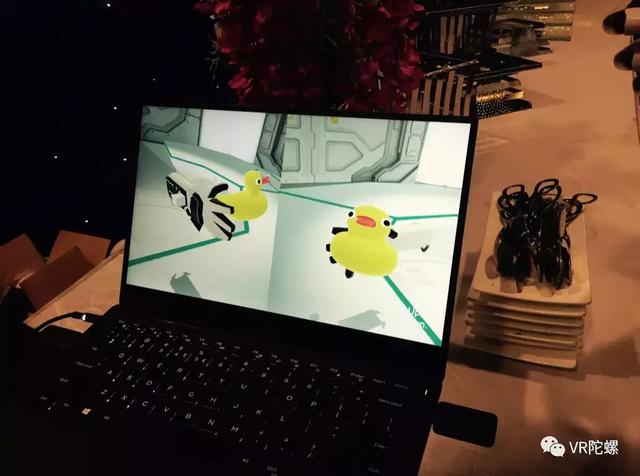
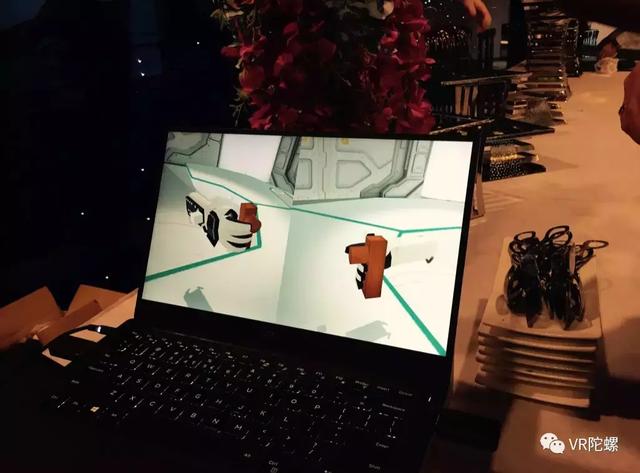
ИэёцDemoҙъұнБЛИэЦЦІ»Н¬өДРОЧҙЎўІДЦК,ұИИзФЪЧҘРЎ»ЖСјКұ,»бДЈДвіцЖдөҜРФ,ФЪІ»Н¬өДБҰөАПВ»б»сөГІ»Н¬өД·ҙөҜЧчУГБҰЎЈ¶ш·ҪҝйФт№КТвұ»ЙиЦГіЙУРН№ЖрІҝ·Ц,өұОТФЪРйДв»·ҫіЦРПлТӘДуҪфОпМеКұ,»бКЬөҪКЦМЧ¶ФёчёцКЦЦёФЛ¶ҜөДЦЖФј,ҙҘөҪРйДвОпМеІҝ·ЦҫНОЮ·ЁФЩјМРшЯ¬Ҫф,·В·рХжөДДуЧЕТ»ҝйУІ°о°оөД·ҪҝйЎЈ
ҫЭҪйЙЬ,DexmoКЗТ»ҝоЧЁГЕУГУЪVRЦРҪ»»ҘөДОЮПЯКэҫЭКЦМЧ,ҫЯУРЗбұгРФәНҝЙұдБҰ·ҙАЎөДәЛРД№ҰДЬЎЈЛьҝЙТФёщҫЭРйДвОпЖ·өДРОЧҙТФј°ИнУІІ»Н¬,К№өГГҝёцКЦЦё¶јДЬёРөҪІ»Н¬іМ¶ИөДҙҘ·ўБҰ,ТФј°ёРЦӘөҪОпМеөДРОЧҙ,ІўЗТКөПЦБЛОЮПЯБ¬ҪУЎЈ
өұУГ»§өДРйДв»ҜЙнУцөҪТ»ёцРйДвОпМеКұ,ҝЙНЁ№эDexmoөДЎ°dynamic grasping-handlingЎұ(¶ҜМ¬ОХіЦҙҰАн)Лг·ЁАҙёРКЬөҪРйДвОпМеөДОпАнРФЦК,¶шХвёцИнјю»бПтУГ»§МṩёчЦЦАаРНөДБҰ·ҙАЎЎЈКөјКЙП,ХвёцЧ°ЦГ»бПтКЦЦёМṩ·ҙЧчУГБҰ,К№өГРйДвОпМеҝЙТФМṩһЦЦЎ°·ҙНЖЎұөДёРҫх,ҫНИзН¬ФЪЧҘОХХжКөөДОпМеТ»СщЎЈ
Ў°ҪиЦъDexmo,ДгҝЙТФёРКЬөҪРйДвОпМеөДҙуРЎЎўРОЧҙЎўТФј°УІ¶ИЎЈДгҝЙТФҙҘГюөҪКэЧЦКАҪзЎЈЎұ

DexmoУлPCНЁ№э2.4GОЮПЯДЈҝйҪшРРНЁРЕ,К№УГЖдЧФ¶ЁөДНЁС¶РӯТйҪшРРКэҫЭС№ЛхәНРЈСй,И·ұЈҙ«КдөДЛЩ¶ИәНОИ¶ЁРФЎЈНЁС¶СУКұФЪ5-20ms,ЛгЙПөз»ъПмУҰСУКұ,НјПсдЦИҫСУКұөИөИ,ёҙәПСУКұТ»°гФЪ50msТФПВ,УГ»§ТСҫӯІ»М«ДЬ№»ёРҫхөҪСУіЩЎЈ
ФЪРшәҪЙП,ҫЭіЖДҝЗ°Чо¶аҝЙТФЧцөҪ4РЎКұөДК№УГКұјд,Йиұё»№ФЪіЦРшёДҪшЦРЎЈ
ҙУҝӘКјСР·ўөҪХвТ»ІҪҫӯАъБЛ3Дк,ІъЖ·ТІөьҙъБЛјёК®ҙО, DexmoҙУ2017ДкҝӘКјХэКҪ¶ФНвПъКЫҝӘ·ўХЯ°жDexmo Development Kit 1,ҪШЦ№өҪДҝЗ°ТСҫӯНкіЙОеёцЕъҙОөДБҝІъ,ЖЪјд»№»сөГБЛ2017ДкReddotәмөгІъЖ·№ӨТөЙијЖҪұТФј°2018ДкiFІъЖ·№ӨТөЙијЖҪұЎЈ
ФЪБҝІъөД№эіМЦРІ»¶ПНкЙЖ№ШјьјјКхөДЙъІъ№ӨТХ,АэИзОўРН¶ж»ъөДЙијЖЙъІъ,ёЯР§ҝЙРРРФСйЦӨ,Лі»¬өДөз»ъҝШЦЖЛг·ЁөИөИЎЈОӘБЛёьәГөД°СҝШІъЖ·ЦКБҝ,№ИеРіЫЙхЦБёцИЛИл№ЙЖдІъЖ·өДҙъ№Өі§,И«ЕМја¶ҪІъЖ·ҙУЙијЖөҪЙъІъөДИ«№эіМЎЈ
ЦБУЪОӘКІГҙ»бСЎФсЧцХвСщөДНвЙи,№ИеРіЫМбөҪ:Ў°ОТГЗПаРЕЧФјәХэФЪЧцөДКВЗй¶ФРРТөАҙЛөКЗУРЦШҙуНЖҪшЧчУГөД,ТтОӘН·ПФ+БҰ·ҙАЎКЦМЧҝЙТФКөПЦЧоХжКөөДИэО¬»·ҫі·ВХжЎЈЎұ
¶ЁО»ёЯ¶Л,ДГПВРРТөҙуҝН»§
јИИ»КЗТ»ҝоНвЙиІъЖ·,ДЗГҙГчИ·өДІъЖ·¶ЁО»әЬЦШТӘЎЈФЪ№ИеРТЈіЫҝҙАҙ,ДҝЗ°Жд»№КЗЦчТӘ¶ЁО»ұИҪПёЯ¶ЛөДКРіЎЎЈ
ҫЭіЖ,ДҝЗ°ҝН»§»№КЗЖуТөәНСРҫҝ»ъ№№ҫУ¶а,ЦчТӘҝН»§ИәМе»№КЗЖуТөәНёЯРЈ,әЈНвҝН»§ДТАЁNASA JPLЕзЖш¶ҜБҰКөСйКТ,РЭЛ№¶ЩУоәҪЦРРД,Toyota,Boston Dynamics,Microsoft,Google,SonyөИ,№ъДЪ°ьАЁЦР№ъәҪМмФұҝЖСРСөБ·ЦРРД,№ъјТөзНш,әЛөзХҫ,ЦРКҜУНөИ;ҝЖСР»ъ№№ҝН»§УРMIT media lab,Cambridge Engineering DepartmentөИЦӘГыёЯРЈСРҫҝФәЎЈ
Ў°УЙУЪХвР©ИЛИә¶ФјЫёсІ»ГфёР,ө«КЗҝКЗуРВјјКхәНёьәГөДМеСй,Хв¶ФОТГЗөДКЫәуТӘЗуәНИнјю·юОсТӘЗу»бМШұрөДёЯЎЈ¶ФУЪХвР©ИәМеОТГЗИФИ»»бұЈіЦТ»№бөДёЯЦКБҝІъЖ·,УЕЦК·юОсәНёЯјЫЙМЖ·өДІЯВФЎЈЎұ
ө«¶ФУЪТ»Р©ҙУСРҫҝЛщЧЯіцАҙөДТСҫӯВдөШөДУҰУГ,АэИзПЯПВМеСй№Э,РЎЗшУтVRЧчТө·ВХжөИ¶ФDexmoУРёьёЯРиЗуБҝөДіЎҫ°,Dexta RoboticsТІ»бНЖіцЖуТө°жұҫөДDexmo,јЫёсПа¶ФСРҫҝ°жұҫ»бПВөчЎЈ
Ў°DexmoЧчОӘТ»ёцҙУАҙГ»УРИЛЧц№эөДОўРН»ъЖчИЛПөНі,ФЪІъЖ·ЙъІъөД№эіМЦРРиТӘ№ҘҝЛОЮКэөДА§ДСЎЈЎұ№ИеРіЫұнКҫ,Ў°іэБЛІъЖ·ұҫЙнөДМбЙэТФНв,ОТГЗНЁ№э·ЦОцКэЕъБҝІъІъЖ·ЦРЛщІъЙъөДОКМв¶ФЙъІъ№ӨТХҪшРРБЛИ«ҫЦөДУЕ»Ҝ,ҪЁБўЖрБЛХл¶ФБҰ·ҙАЎНв№ЗчАХвПојјКхөДTechnology Know-HowЎЈКРГжЙПУРТ»Р©·ВФмDexmoөДІъЖ·,ЛдИ»УРЧЕПаЛЖөДНв№Ы,ө«КЗИнјюәНЙъІъХвБҪөАҝІұИНвРОТӘДС№эөД¶аЎЈЎұ
ө«ҙУДҝЗ°өДМеСйАҙҝҙ,DexmoХвҝоІъЖ·ПлТӘҙпөҪЎ¶Н·әЕНжјТЎ·ЦРөДұнПЦ»№ПФөГІ»№»ЎЈТтҙЛ,Dexta RoboticsТІТ»ЦұФЪјјКхЙПҪшРРөьҙъәНУЕ»ҜөД№ӨЧчЎЈ
ҪьЖЪҫНФЪУІјю·ҪГж,DexmoНкЙЖБЛИбРФ¶ж»ъөДЙъІъјУ№Ө№ӨТХ,ФЪёьРЎМе»эДЪЙијЖЙъІъБЛёьҙуЕӨҫШЗТИФИ»Лі»¬өД¶ж»ъЎЈИнјю·ҪГж,ЧФҙУ2017ДкөЧОўИн¶ФЦЪ¶аOEMі§ЙМәПЧчНЖіцinside out trackingөДН·ПФ, ҝмСёЛЩКөПЦБЛ¶ФWindows MRН·ПФИ«ПөБРН·ПФөДИнјюјжИЭЎЈН¬КұФЪҙ©ҙчКжККРФЙПЧцБЛәЬҙуөДёДҪш,Хл¶ФІ»Н¬өДКЦРННЖіцБЛҝЙөчҪЪөДКЦЦё°уҙш,ФЪМбЙэИЛМе№ӨС§ЙПЧціцБЛәЬ¶аіўКФЎЈ
DexmoҫЯМеИзәОУҰУГ?
ФЪІъЖ·өДКЗКөјКУҰУГЙП,№ИеРіЫОӘОТГЗБРҫЩБЛәЬ¶аКөАэАҙҪшРРЛөГчЎЈ
ТФәЛөзХҫОӘАэ,ЛыГЗПИУГVRҙоҪЁТ»ёцНкИ«·ВХжөДРйДв»·ҫі,ДЈДвТ»Р©МШКвіЎҫ°,ИзәЛДЬФҙР№В¶·ўЙъКұөДЗйҝцЎЈИ»әуҪУКЬІвКФ»тСөБ·өДФұ№ӨЕеҙчVRН·ПФәНDexmoФЪХвСщөДПХЗйПВҪшРРРйДвІЩЧч,УҰёГПИ№ШұХДДёц·§ГЕ,°ҙПВДДР©°ҙјьөИөИЎЈХвР©ҫ«ПёөД¶ҜЧчЦ»УРҙшУРБҰ·ҙАЎөДКЦМЧҝЙТФЧцөҪ,КЦұъОЮ·ЁДЈДвКЦЦёөДҫ«Пё¶ҜЧч,¶шТ»°гөДКэҫЭКЦМЧУЦ»бҙ©НёРйДвОпМе,ҪцҪцКЗИГУГ»§ДЬҝҙөҪЧФјәөДКЦ,ИҙОЮ·ЁХжКөөДәНРйДвКАҪзҪшРРҪ»»Ҙ,іБҪюёРҙуҙтХЫҝЫЎЈТФНщХвР©ҪМС§ІвКФіЎҫ°ҪП¶а¶јКЗКУЖө,ОДөөөИөҘ·ҪГжөДРЕПўҙ«өЭ,ФЪУРБЛVRЦ®әуІ»№вҝЙТФёьДвХжөДдЦИҫіЎҫ°,ТІҝЙТФҙУіЎҫ°ЦРКХјҜУГ»§·ҙАЎ,Іў¶ФЖдРРОӘҪшРРҙт·ЦТФј°ҫАХэ,Р§№ыКЗФ¶Ф¶әГУЪҙ«НіөДЕаСөөДЎЈ

»№УРТ»Іҝ·ЦУГ»§К№УГDexmoҪшРР»ъЖчИЛБйЗЙКЦ»тХЯ»ъРөұЫөДҝШЦЖЎЈ
Ў°ұИИзBoston DynamicsөДәПЧчСРҫҝ»ъ№№ihmcҫНФшҫӯБӘПө№эОТГЗОКСҜ№эИзәОК№УГDexmoҝШЦЖИЛРО»ъЖчИЛAtlasөДКЦІҝЎЈПаЛЖөДИХұҫөДToyotaТІ№әВт№эОТГЗөДЙиұё¶ФЛыГЗөДИЛРО»ъЖчИЛөДБйЗЙКЦҪшРРТЈІЩҝШЎЈГА№ъNASAөДРЭЛ№¶ЩУоәҪЦРРДФшПлУГDexmoҪшРРМ«ҝХІХНв»ъЖчИЛҫ«ПёІЩЧчөДҝШЦЖ,УЙУоәҪФұФЪІХДЪҝШЦЖҪшРРәҪМмЖчНвМ«ҝХөДОЮИЛҫ«ГЬО¬РЮЎЈУў№ъЦӘГыөД»ъЖчИЛ№«ЛҫShadow RoboticsәНОТГЗФЪUCLУРЧц№эJoint research,К№УГDexmo¶ФShadow HandsҪшРРФ¶іМҝШЦЖЎЈЎұ
ХвР©УГ»§Ц®ЛщТФСЎФсDexmo,№ИеРіЫИПОӘЦчТӘ»№КЗТтОӘЖдІ»ҪцҪцКЗЖХНЁөДКэҫЭКЦМЧ,¶шЗТДЬ№»ёщҫЭіЎҫ°Мṩұд»»өДБҰ,ҪшРРҙшУР·ҙАЎөДҫ«ГЬҝШЦЖЎЈ
2018ДкФӨјЖУӘКХі¬З§Нт,ұЈУРј«ёЯАыИуВК
ФЪЛіАыДГПВЦо¶аЖуТөҙуҝН»§әу,№ИеРіЫ¶ФУЪҪсДкөДПъКЫ¶о·ЗіЈУРРЕРД,ЛыФӨјЖ2018ДкөЧҝЙТФҙпөҪЗ§Нтј¶ұрөДБчЛ®,ЗТҝЙТФұЈУРј«ёЯөДАыИуВКЎЈ

ФЪ№ИеРіЫҝҙАҙ,VRРРТөХыМеТСҫӯҪшИлЖҪОИ·ўХ№ЖЪ,јјКхөД»щҙЎҪЁЙиТСҫӯЦрҪҘНкЙЖ:ұИИзОўИнөДMRПөНіТСҫӯІШФЪПөНіёьРВАпЗДОЮЙщПўөД°ІЧ°ҪшәЬ¶аИЛөДөзДФАпБЛ;MRН·ПФөДinside-outЧ·ЧЩФҪАҙФҪНкЙЖ,І»РиТӘНвІҝЙгПсН·,ҪцҪцҙшЙПН·ҝшҫНДЬҪшИл6DofөДРйДвКАҪзБЛ;УГ»§¶ФРйДвПЦКөөДҝЖЖХТІТСҫӯҙуЦВНкіЙБЛЎӯЎӯ
ҙЛНв,ЙоЫЪТІёшБЛЖдФЪУІјюЙПөДөШУтУЕКЖЎЈЎ°Из№ыЛөН·ПФөДДСөгФЪ20%өДУІјюәН80%өДИнјю,БҰ·ҙАЎКЦМЧХвёцЙиұё¶ФУІјюРФДЬөДТААөРФҝЙДЬёЯҙп60%,Хв¶ФГА№ъsoftware-centricөДҙҙТөХЯАҙЛөМ«ДСБЛ,ЧцТ»ёцөз»ъЧйСщЖ·өИТ»ёцФВ,ЛыГЗГ»УРХвёцМхјю°СТ»ёц»№ФЪМҪЛчЖЪөДУІјюІъЖ·ЧцҝмЧцәГ,¶шОТГЗИҙДЬТФЧоҝмөДЛЩ¶ИИГПл·ЁҫЯПу»ҜЎЈЎұ
Ў°ХвР©Мхјю¶јОӘОТГЗ№«ЛҫөДіЙіӨөм¶ЁБЛ»щҙЎЎЈУРБЛ°ЩНтј¶ұрёЯ¶ЛН·ПФөДЧ°»ъБҝ,»бУРёь¶аөДҝН»§ТтОӘПлТӘёьәГөДМеСй¶шХТөҪОТГЗЎЈ¶шЗТФзЖЪөДН¶»ъЦчТеХЯГЗТСҫӯАліЎ,БфПВАҙөД¶јКЗ¶ФРРТөУРЧФјәөДАнҪвөД,ёЎ»Ә№эәу·ҙ¶шёшОТГЗХвЦЦРЎ№«ЛҫҙшАҙБЛЧг№»өДіЙіӨҝХјдЎЈЎұ
ДҝЗ°Dexta RoboticsНЕ¶У»№ФЪіЦРшА©ХЕЦР,№ИеРіЫұнКҫ,ҙЛВЦЧКҪрҪ«ЦчТӘУГУЪХРЖё№ӨіМКҰәНЖдЛыИЛІЕ,УГ»§РВІъЖ·өДСР·ўЎўИнјюПөНіөДНкЙЖЎўЙиұёөДЙъІъУлПъКЫ,№№ҪЁ№«ЛҫөДКЫЗ°КЫәуМеПө,ОӘҝН»§МṩёьәГөДјјКхЦ§іЦЎЈ

 ·ЦПн
·ЦПн








ЧоРВ»о¶Ҝёь¶а
-
4ФВ17ИХБўјҙұЁГы >> ЎҫПЯПВВЫМіЎҝРВМЖҝЖјјЎБРҫМЖДПҫ© 2026 Дк¶ИСРМЦ»б
-
ҫ«ІК»Ш№ЛБўјҙІйҝҙ>> Ўҫ·ўІј»бЎҝFlexiverse 2026 ·ЗПҰҝЖјјРВЖ··ўІј»б
-
ҫ«ІК»Ш№ЛБўјҙІйҝҙ>> ЎҫГв·СІО»бЎҝ2025ә«№ъЦЗДЬЦЖФмј°»ъРөЙиұёЖуТөГіТЧЗўМё»б
-
ҫ«ІК»Ш№ЛБўјҙІйҝҙ>> И«Кэ»б2025ЈЁөЪБщҪмЈ©»ъЖчИЛј°ЦЗДЬ№Өі§Х№
-
ҫ«ІК»Ш№ЛБўјҙІйҝҙ>> ЎҫПЯПВВЫМіЎҝРВМЖҝЖјј2025РВЖ··ўІј»б
-
ҫ«ІК»Ш№ЛБўјҙІйҝҙ>> ЎҫФЪПЯЦұІҘЎҝҪвГЬРРТөјмІвБчБҝГЬВлЎӘЎӘөзЧУУл°лөјМеРРТө
НЖјцЧЁМв
- 1 З§ОКAIСЫҫөЖШ№вЈ¬ј«ГЧMemoMind OneЖШіцПёҪЪЈ¬MWC 2026ЙПөДЦо¶аСЫҫөҝҙөг
- 2 ·зПтЧӘұдЈ¬MetaРВҝоН·ПФҪвОц
- 3 К®ДкДҘТ»ҪЈЈЎ№ИёиУГGemini 3СЫҫөЦШРВЙұ»ШЕЖЧАЈ¬КЗҪшІҪ»№КЗө№НЛЈҝ
- 4 RokidИИБЛЈ¬ө«ARСЫҫөөДУІХМІЕёХҝӘКј
- 5 УўО°ҙпCloudXRөЗВҪvisionOSЈәXRЛгБҰёпГьөДҝӘКј
- 6 Ж»№ыё»№уЎўMetaКЎЗ®Ј¬XR Йо¶ИёРЦӘХжХэөДөЪИэМхВ·ФЪЦР№ъ
- 7 ҙуДЈРНөЯёІAIСЫҫөИьөАҫәХщВЯјӯЈ¬СЫҫөі§ЙМёГСәЧўИнјю»№КЗУІјюЈҝ
- 8 ARТюРОСЫҫөЎ°ЙъЛАҫЦЎұЈә№АЦөҝсмӯ13.5ТЪөДXPANCEOЈ¬КЗөұҪсARөДН·әЕЕЭДӯВрЈҝ
- 9 И«№ъБҪ»бЙПөДAIСЫҫөЈәУ°ДҝЎўҝдҝЛЎўАЧДсЎўRokidЎӯЎӯЦРНвјЗХЯХщЗАұЁөАЙсЖч
- 10 VRУОП·ЦЬұЁ | SteamҙәјҫРВЖ·ҪЪЈ¬Ҫь40ҝоVRУОП·DEMOЙППЯ

- ёЯј¶Инјю№ӨіМКҰ №г¶«КЎ/ЙоЫЪКР
- ЧФ¶Ҝ»ҜёЯј¶№ӨіМКҰ №г¶«КЎ/ЙоЫЪКР
- №вЖчјюСР·ў№ӨіМКҰ ёЈҪЁКЎ/ёЈЦЭКР
- ПъКЫЧЬјаЈЁ№вЖчјюЈ© ұұҫ©КР/әЈөнЗш
- јӨ№вЖчёЯј¶ПъКЫҫӯАн ЙПәЈКР/әзҝЪЗш
- №вЖчјюОпАн№ӨіМКҰ ұұҫ©КР/әЈөнЗш
- јӨ№вСР·ў№ӨіМКҰ ұұҫ©КР/ІэЖҪЗш
- јјКхЧЁјТ №г¶«КЎ/ҪӯГЕКР
- ·вЧ°№ӨіМКҰ ұұҫ©КР/әЈөнЗш
- Ҫб№№№ӨіМКҰ №г¶«КЎ/ЙоЫЪКР


·ўұнЖАВЫ
өЗВј
КЦ»ъ
СйЦӨВл
КЦ»ъ/УКПд/УГ»§Гы
ГЬВл
БўјҙөЗВјјҙҝЙ·ГОКЛщУРOFweek·юОс
»№І»КЗ»бФұЈҝГв·СЧўІб
НьјЗГЬВлЖдЛы·ҪКҪ
ЗлКдИлЖАВЫДЪИЭ...
ЗлКдИлЖАВЫ/ЖАВЫіӨ¶И6~500ёцЧЦ
ФЭОЮЖАВЫ
ФЭОЮЖАВЫ